The move towards automated machinery in agriculture relies on one non-negotiable element: trust in the machine's positional awareness. For a system to assume control of steering, it must know its location in the field with exceptional reliability. This is the role of Real-Time Kinematic (RTK) correction, a technology that elevates standard GPS signals to the level of accuracy required for precise agronomy. Understanding this science clarifies why not all guidance is equal, and how tractor auto steering achieves the repeatable, centimeter-level performance that modern farming practices demand. We see RTK not as a mere feature, but as the critical infrastructure enabling true precision.

The Limitation of Standalone GPS Signals
Basic GPS receivers calculate position by measuring the time it takes for signals to travel from satellites to the ground. While functional for navigation, this method is subject to inherent errors. Atmospheric interference, satellite clock drift, and orbital deviations can introduce inaccuracies ranging from several meters to over a foot. For tasks like field mapping or rough guidance, this may be tolerable. However, for operations like seeding, planting, or controlled traffic farming, such variability is untenable. A pass-to-pass error of even a few inches can result in input overlap, crop damage, or missed strips. This fundamental gap between standard GPS capability and agronomic necessity is what RTK correction exists to solve.
The RTK Method: A Fixed Reference for a Mobile Rover
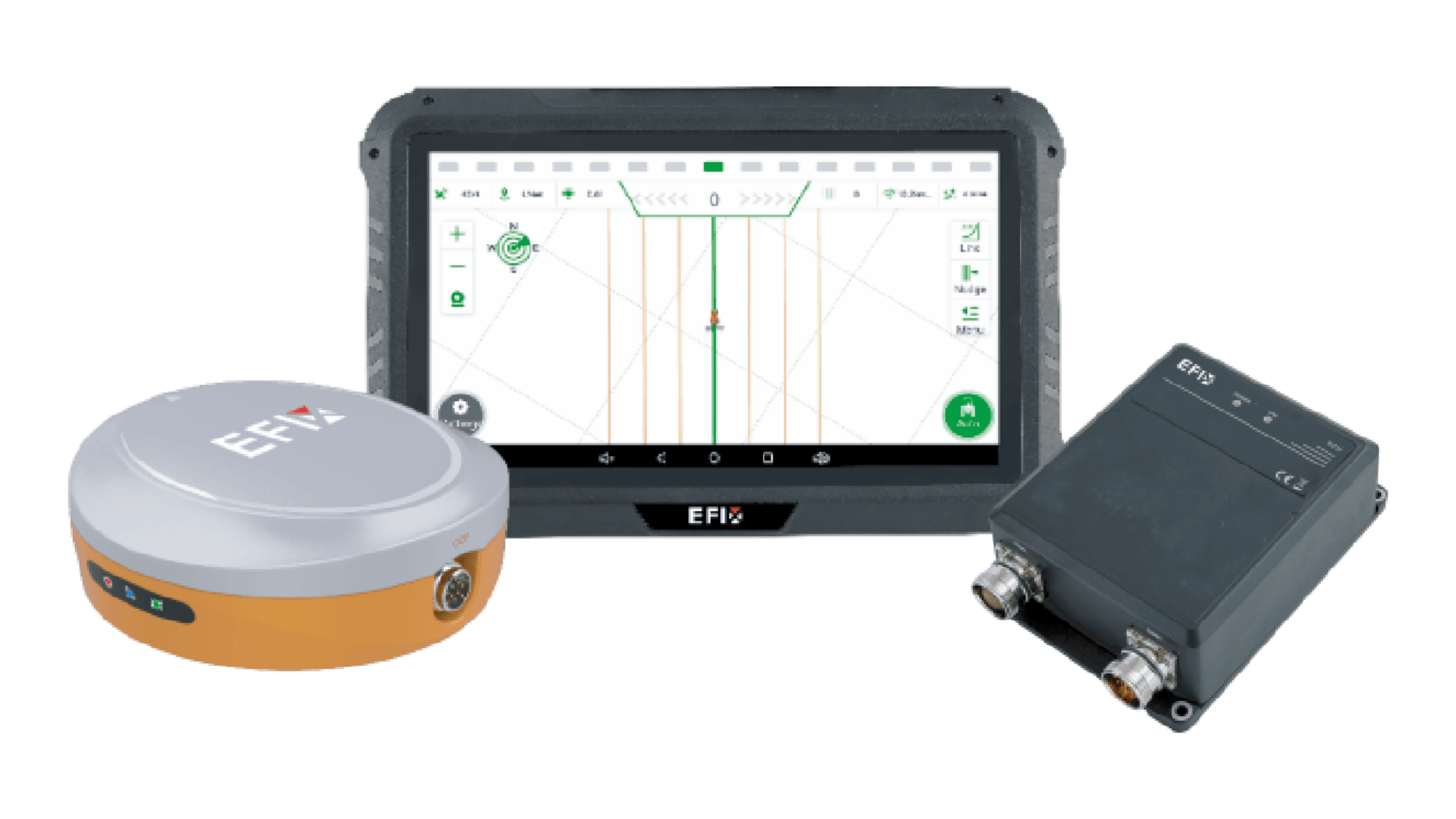
The RTK solution employs a two-unit system. A stationary base station is placed at a known, fixed point on the farm or within a local network. This base station receives the same public GPS signals as the moving tractor but, knowing its exact location, can calculate the precise error contained in those signals in real-time. It then broadcasts a stream of correction data to the rover receiver on the tractor. The rover uses this localized correction to virtually eliminate the errors affecting its own satellite signal calculations. This process, happening continuously, allows the tractor auto steering system to determine its position with consistent accuracy of about 1 inch (2.5 centimeters), transforming the tractor into a tool of exceptional spatial repeatability.
From Positional Accuracy to Agronomic Outcome
This technical achievement directly enables advanced field practices. With centimeter-accurate positioning, a machine can return to the exact same path year after year, solidifying the benefits of controlled traffic farming by permanently confining compaction to specific tramlines. It allows for accurate inter-row cultivation, minimizing crop damage. For spraying or fertilizing, it ensures perfect bout matching, eliminating gaps and harmful overlaps. The reliability of the RTK-corrected position is what gives the tractor auto steering system the confidence to operate independently. The operator’s role shifts from constant steering adjustment to higher-level supervision and management, supported by the certainty of the machine's path.
The science behind RTK accuracy is what separates simple direction-keeping from genuine field automation. It provides the positional integrity that allows complex machinery to execute precise agronomic plans without drift or guesswork. This creates a stable digital framework upon which efficiency, input savings, and soil conservation strategies are built. At Efix, our development of guidance and steering solutions is centered on harnessing this RTK foundation reliably. We focus on integrating this precise correction technology into robust systems that deliver consistent performance, ensuring the sophisticated positioning data translates into tangible, trustworthy results in the field every day.