When a farmer guides equipment across a field, the challenge has always been maintaining perfect alignment pass after pass. An auto steering system addresses this by managing the vehicle's direction automatically, allowing the operator to focus on implement performance and overall situational awareness. We will look at the functional principles that make this technology a practical tool in modern operations. The core idea is replacing continuous manual steering corrections with electronic control, leading to measurable improvements in field efficiency and input placement.

Core Components and Their Functions
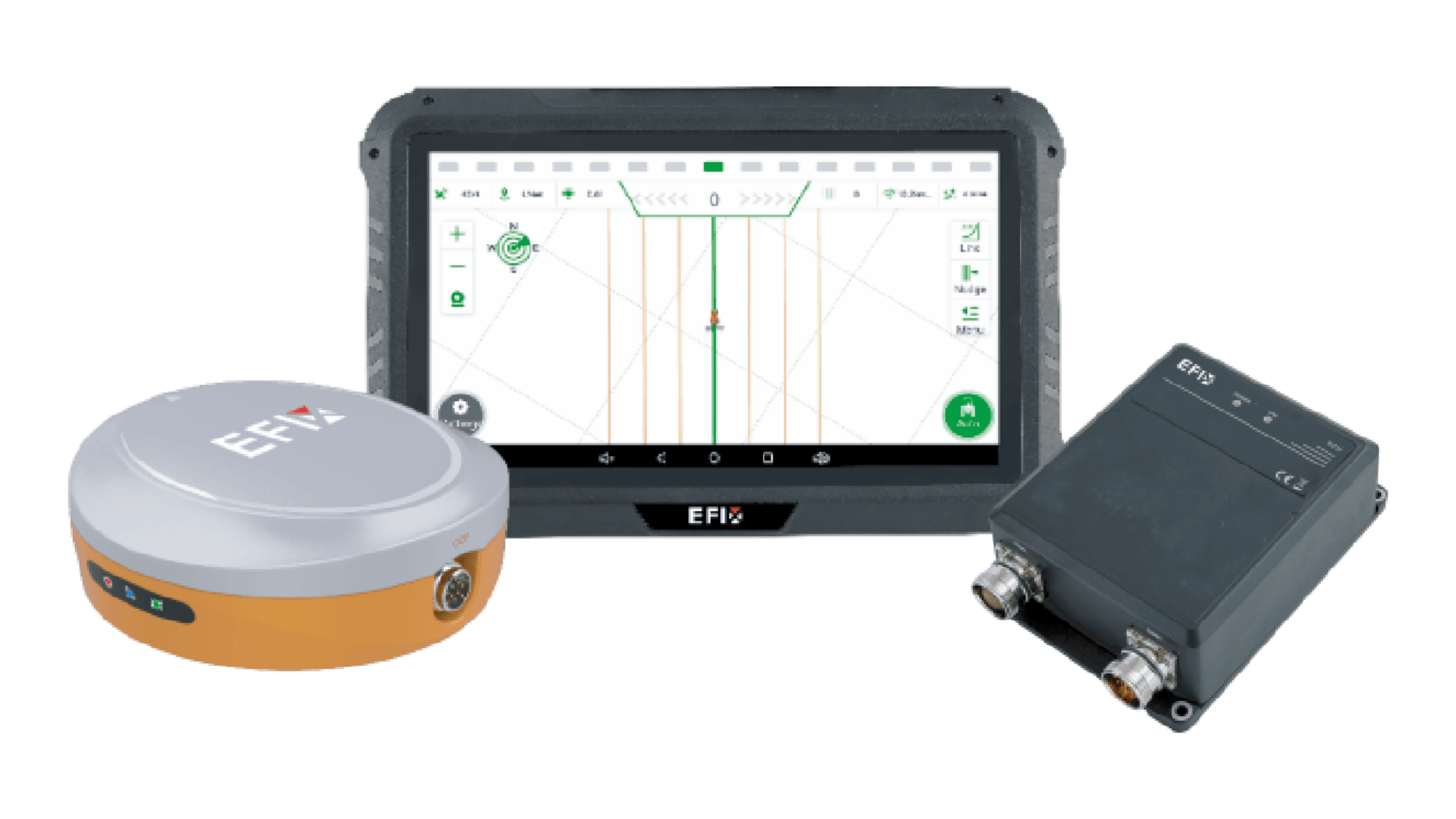
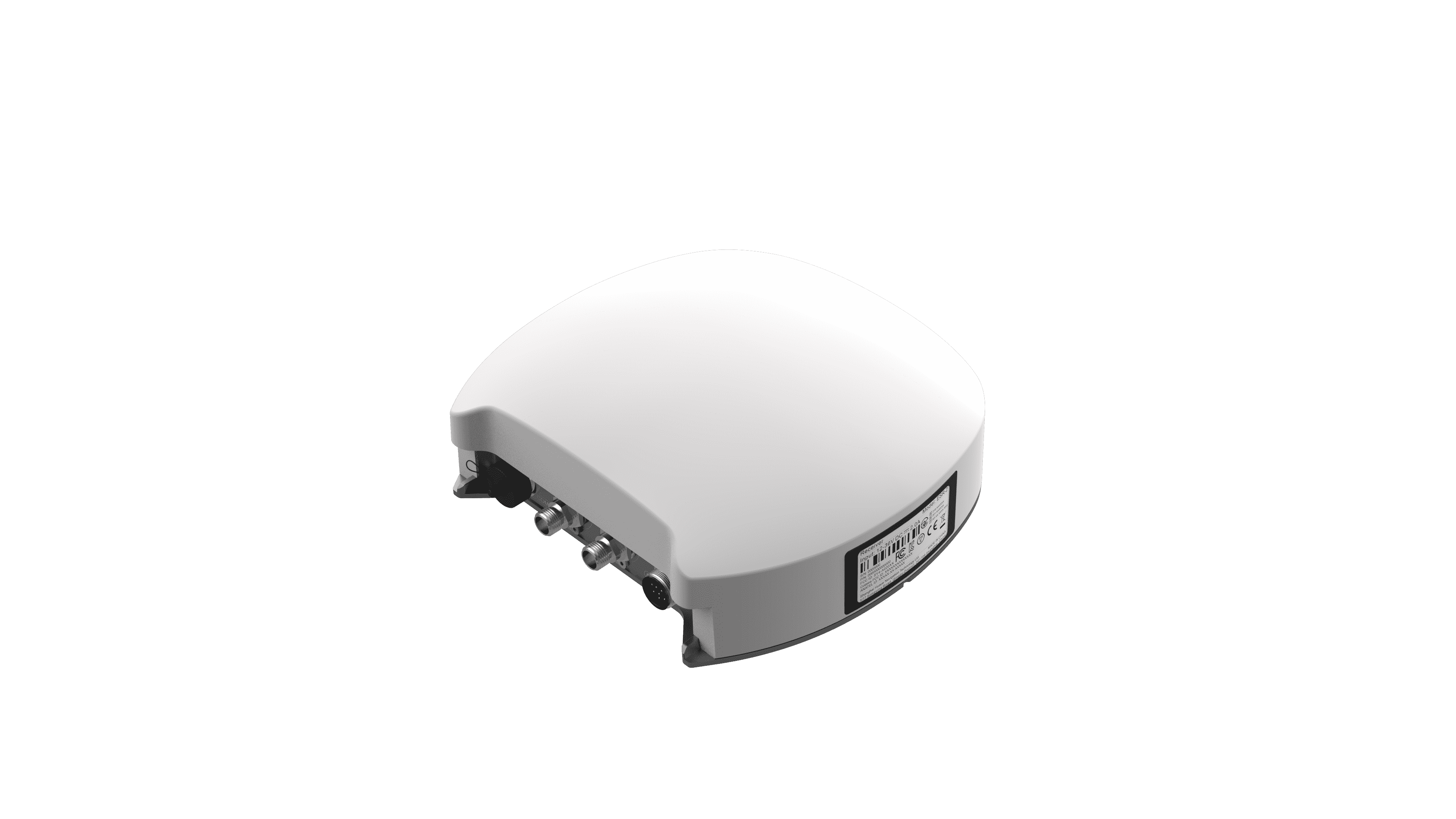
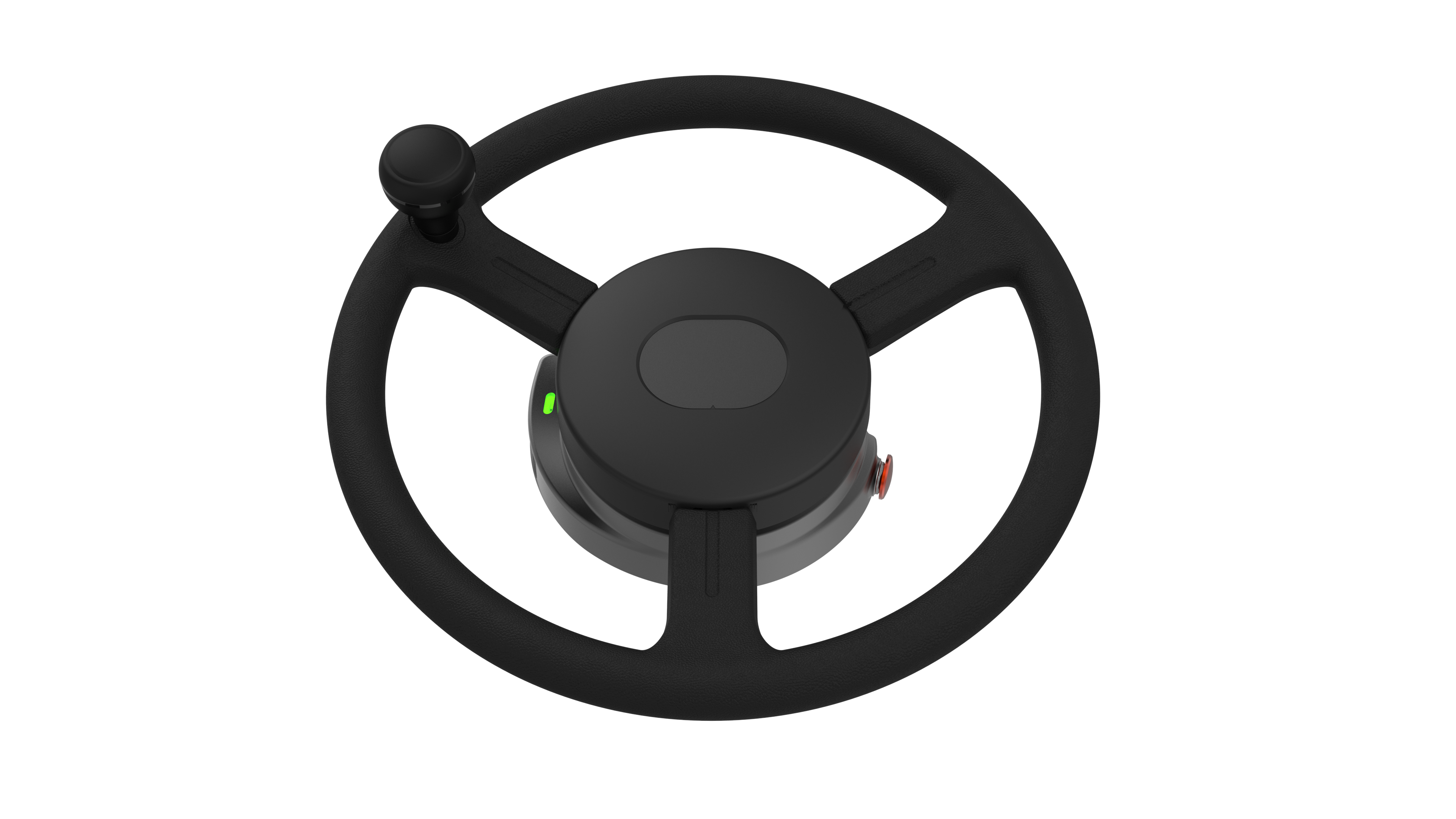
The setup consists of several key hardware elements working together. A high-accuracy GPS receiver is mounted on the vehicle's roof, determining its precise position on Earth. This receiver connects to a steering controller, which is electronically linked to the tractor's hydraulic steering mechanism. An in-cab display unit serves as the user interface, showing position, line guidance, and system status. The true functionality emerges from how these components communicate; the GPS provides constant positional data to the controller, which calculates the necessary adjustments and commands the hydraulic valves to turn the wheels minutely and continuously. This creates a closed-loop of measurement and correction.
The Role of Correction Signals and Path Planning
Raw satellite signals alone lack the fine accuracy needed for precise agricultural work. Therefore, an effective auto steering system utilizes a correction signal. This signal comes from a subscription-based satellite network or a local base station, providing real-time adjustments to the GPS data, reducing positional error to within an inch. With this corrected position, the system's software can generate a pre-defined guidance line—straight AB lines, curved contours, or complex headland patterns. The controller's task is to keep the vehicle's determined position aligned with this virtual line, issuing constant micro-corrections to the hydraulics to counteract drift, slope, or implement pull.
Implementation and Practical Outcomes in the Field
From an operational perspective, the farmer’s role shifts from driver to supervisor. After initial field boundary mapping and guidance line creation on the display, the operator engages the auto steering system. The vehicle then follows the prescribed path with a consistency unattainable through human steering alone. This has direct, observable consequences. Overlap between passes is drastically reduced, conserving seed, fertilizer, and fuel. Soil compaction is better managed through controlled traffic lanes, as the system can reliably guide the tractor along the same tracks each season. Furthermore, it enables operations to continue in low-visibility conditions, such as dust or darkness, maintaining schedule reliability.
The mechanism is fundamentally one of enhanced control through precise measurement and automated response. It translates satellite signals and software algorithms into physical steering actions that optimize field coverage and resource application. This creates a foundation for more advanced variable-rate and data-collection practices, as the vehicle's exact path is known and repeatable.
Our work at Efix is centered on the reliable application of these mechanical and electronic principles. We provide solutions that translate these functional concepts into durable, user-tools, supporting the move toward more consistent and measured field operations.